Qualityokary hilli senagat robot goly Slew Drive ulanýar



Qualityokary hilli senagat robot goly Slew Drive ulanýar
Slew drive, senagat programmalarynda ygtybarly we tehniki hyzmat etmez.Robot golunda ulanylyp bilner.Önümçilik zawodlary we senagat tehnikasysürüjigüýç hereketine we aýlaw momentine gözegçilik etmek üçin.Mehaniki enjamlar we robot enjamlary bil baglaýarlarsürüjiýerleşiş takyklygy we yzygiderli öndürijiligi üçin.
Roboticýaraglaregilip we aýlanyp bilýän bogunlary bolan mehaniki enjamlardyr.Kompýuter tarapyndan dolandyrylýan elektrik hereketlendirijileri bilen hereket edýärler.Gurallar goluň “eli” ujuna ýerleşdirilip bilner we kompýuter olary kesmek, burawlamak, kebşirlemek we reňklemek ýaly dürli işleri ýerine ýetirmek üçin programmirlendi.Şeýle hem, radioaktiw materiallary ýa-da ýarylmadyk bombalary ulanmak ýaly howply meseleler üçin ulanylýar.
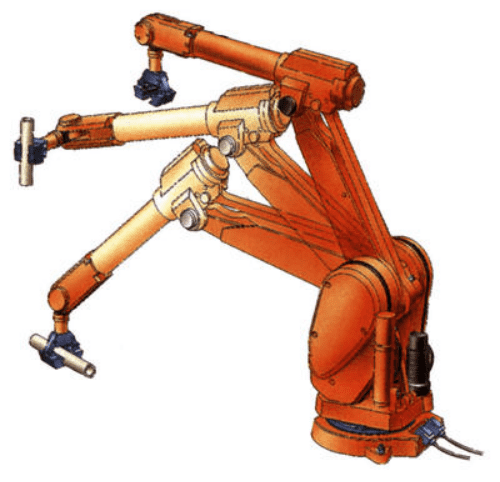
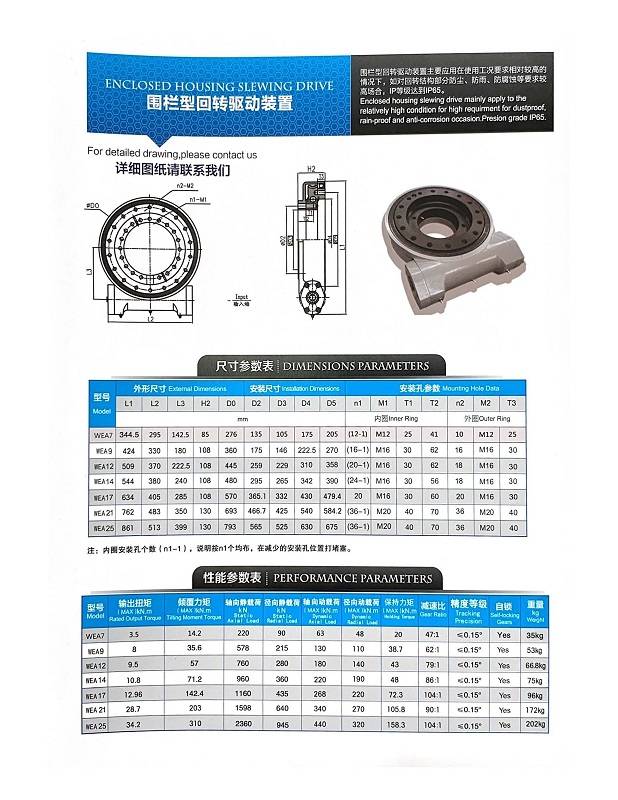
Egri diş gurluşynyň dizaýny bilen, WEA Slewing sürüjisi has ýadawlyga we baglanyşyk ukybyna eýe, bu agyr we orta tizlikli programmalar üçin amatly, Robotic Arm programmasy üçin amatly.
WEA Slewing sürüjisiniň katalogyny görüp bilersiňiz.
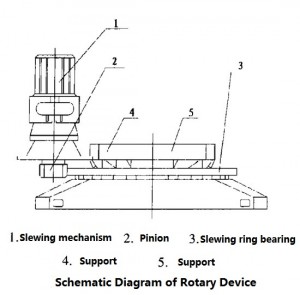
Sürüji hereketlendiriji radial we eksenel ýükleri ygtybarly saklap bilýän, şeýle hem aýlanmak üçin tork geçirip bilýän dişli gutydyr.Aýlanma bir okda ýa-da birnäçe okda bolup biler.Süýşüriji hereketlendirijiler dişli enjamlar, podşipnikler, möhürler, ýaşaýyş jaýy, motor we beýleki kömekçi komponentleri öndürmek we taýýar dişli gutujyga ýygnamak arkaly ýasalýar.
Sürüji hereketlendiriji, bir basgançakly dişli enjamlaryň uly bölegini üpjün etmek üçin takyk kinematikany ulanýar.Rulmanlar we dişli enjamlar, agramy we öndürijiligi optimizirlemek üçin kiçijik, öz-özüne we gurmaga taýyn gaba ýygnalýar.XZWD öldüriji rultejribeli hökmündesürüjisiöndüriji, ýokary hilli üpjün etmek ukybymyz barsürüjisis.
1. Önümçilik standartymyz JB / T2300-2011 maşyn standartyna laýyklykda, ISO 9001: 2015 we GB / T19001-2008-iň ýokary hilli dolandyryş ulgamlary (QMS) tapyldy.
2. Özümizi ýokary takyklyk, ýörite maksat we talaplar bilen ýöriteleşdirilen pyçakly gözleglere bagyşlaýarys.
3. Çig mal we ýokary önümçilik netijeliligi bilen kompaniýa müşderilere önümleri mümkin boldugyça çalt üpjün edip biler we müşderileriň önümlere garaşmak wagtyny gysgaldyp biler.
4. Içerki hil gözegçiligimiz, önümiň hilini üpjün etmek üçin ilkinji barlagy, özara barlagy, işiň hiline gözegçilik we nusga alma barlagyny öz içine alýar.Kompaniýada doly synag enjamlary we ösen synag usuly bar.
5. Satuwdan soňky hyzmat topary, müşderilere dürli hyzmatlary hödürlemek üçin müşderileriň meselelerini wagtynda çözüň.