Önümler
-
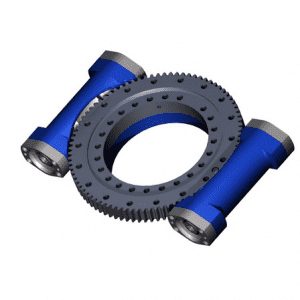
Ekskawator çelegi üçin goşa gurçuk sürüjisi
1. ISTORION AÇYLYK ISB / T2300-2011-iň enjamlaryna görä, ISO 9001: 2015 we GB / T19001-2008-iň netijeli ýokary ylmy ýokary hilli dolandyryş ulgamlaryny (QMS) tapyldy.
2. Highokary takyk, aýratyn maksatly, aýratyn maksat we talaplar bilen özleşdirilen çukurlara dakmak üçin özümizi bagyşlaň.
3.
4 Içerki hil gözegçiligi biziň ilkinji barlag, oňat barlag, gaýtadan işlemekde, işlemekde, gaýtadan işlemekde, gaýtadan işlemekde önümiň hilini üpjün etmek üçin infektiw gözlegde we nusga almak barlagy öz içine alýar. Kompaniýanyň synag enjamlaryny we ösen synag usuly bar.
5. Güýçli satuw topary, satuw gullugy, müşderi meselelerini öz wagtynda çözüň, dürli hyzmatlar bilen üpjün etmek üçin müşderi kynçylyklaryny wagtynda çözýär. -

Hytaýda süýrenýän süýreniji maşynlar ýumşak aýakgap bokurdagy
1. Biz on ýyldan gowrak wagt bäri çişmek öndürijidir.
2. Ösen mehaniki enjamlar we berk hil gözegçilik toparymyz bar.
3. Netijeli önümçilik tizligi we wagtynda gowşuryş hyzmaty.
4. Standart we standart däl önümçiligi kabul ediň. -

Xzwt bir hatar top, diň kran üçin aýlanmak üçin aýlanmak
Her önümçilik jikme-jikliklerini diňe müşderilere gowy önümleriň ulanylmagy üçin.
Sliniň maddasynyň materiallary, umuman, 42 srm, 50mn ýaly ýokary derejeli gurluş howlukdyr.
Rulting Jeset materiallary gcr15 we içerki üpjün edijilerden iň ýokary hilli içerki üpjün edijilerden satyn alynýar.
Hasabat bilen bar bolan önüm: ýeke we iki hatar topy, üç hatar robler, daşarky işli, daşarky geýim we tolgunmadyk arassalamak ýa-da deslapky arassalamak ýa-da öňünden işlemek. -

Xzwd | kebşirlemek roboty üçin Profesd | Professional süýreniji öndüriji
Awtomatlaşdyrylan zawodlarda senagat regotlaryny giňden ýaýrady, önümçilik netijeliligi ep-esli artdyrdy. Senagat robotynyň esasy mehanizmi mehaniki gol. Köp bölünişli erkinlik gurluş dizaýny robotly goluň aşa ýokary çeýeligi almaga mümkinçilik berýär. Ballary takyk tapyp, kosmosdaky berlen traýektora laýyklykda hereket edip biler. Mehaniki goluň rotary mehanizminiň rotary gidrawlik silindrini ýa-da sokýan görnüşde çüýrän şkafyň serişdeleri bilen aýlanýan hereketlendirijini ulanmagy ulanýar.
-

Ýokary takyklyk senagat robotly goly ulanylandy
Samw sürüjisi ygtybarly we hyzmat ediş programmalardaky amatly çykyş edýär. Robot golunda ulanylyp bilner. Ösümlikleri we senagat maşynlaryny öndürmek, tok hereketine we gözegçilikde saklanýan malogiýa ýerleşýär. Mehaniki enjamlar we robotlar takyklygy we yzygiderli öndürijiligi pozýan çüýşe sürýär.
-

Kebşirlemek pozisiýasyny döretmek üçin professional gazyljy öndüriji
Kebşirlemek pozisiýalaryIň amatly kebşirleýiş wezipesine amala aşyrylýan orsýetleşdiriji enjamlar, kebşirleýiş rolleri, kaldy emele edýän roller süýdemdirijiler bilen kebşirleýiş derejesi.
-

Xzwd gyzgyn satuwy daşarky enjamlar bilen bir hatar topy sokmak
Ýekeje hatar dört nokat bilen habarlaşmak topy çatryk2 orun oturgyç jiltinden durýar. Tizlikde hereketlendiriji ykjam we agramda inca.tokarky durmuşda.
-

XzwD | Daşarky dişli takyklyk dishen dinini kesmek
Bir hatar pyşyrdaly rolikli rolikde köp sanly däp-dessurlaryň giňden ulanylýar:
1. Ulag transporty
2. GÖRNÜŞLERI
3.Milletli önümleri -

Aerial iş platformasy üçin ýokary hilli ýalňyzlyk (AWP)
Sinus edmek howa teki platformasy üçin giňden ulanylýar.
Samhylamak materiallary 50mn ýa-da 42CMM ulanyp bolýar
-
AWP-a (howa iş platformasy üçin çişmek (howa iş platformasy)
Sinus edmek howa teki platformasy üçin giňden ulanylýar.
Samhylamak materiallary 50mn ýa-da 42CMM ulanyp bolýar
-

Xzwd kiçi diametri basyp, çalyşmak üçin içerki dişli
1. Dört nokatly hatar dört nokat bilen aragatnaşyk topy gygyrýar.
2. Roks hatar güpürýän dykylan podşipnikleri kesdi
3DE aýry kezzap topy ýumşaklyk göterýär
4. IR-ni hatar rolikleri ýeňýär
5.Bu Bölünmek bezegi (ýeňil görnüşi).
6. -

Xzwd gyzgyn satuw OM Single Singleeke-täk hatar topy Dört nokatly top topy süpürmek
- bu ýüklemez, bu ýüklemezden bu ýüplük halkalar gaty talap edilýändigi şübhesiz, gaty talap edilýändigini subut edýär; ýanaşyk gurluşygyň tekizligine we perpendikulýasiýasyna diňe azajyk talaplar we
Barlag yzygiderlilykdaky takyklygy takyklygy we berkligi sebäpli pes talaplaryň pesdir we berkligi üçin goşmaça talaplar, syny simli kuwwatly enjamlar we gurluşyk mekdebide