XzwD | Hytaý häzirki zaman senagat robotlary üçin iň gowy ýumşak



Awtomatlaşdyrylan zawodlarda senagat regotlaryny giňden ýaýrady, önümçilik netijeliligi ep-esli artdyrdy. Senagat robotynyň esasy mehanizmi mehaniki gol. Köp bölünişli erkinlik gurluş dizaýny robotly goluň aşa ýokary çeýeligi almaga mümkinçilik berýär. Ballary takyk tapyp, kosmosdaky berlen traýektora laýyklykda hereket edip biler. Mehaniki goluň rotary mehanizm mehanizmini häzirki zaman gidrawlik silindrini ýa-da informatika hereketini aSleathing.

Samyşanyşýan şkafy senagat rootlarynyň ösüşinde möhüm rol oýnaýar, şonuň üçin "enjamyň biziň bilelikdäki" diýlip atlandyrylýan. Senagat robotlar önümçilik seminarlarynda giňden ulanylýar. Takynlyk talaplary sebäpli häzirki zaman senagat robotlary az sanly ýumşak ses Çişiküni pese gaçyrýan dalaş edýän roller süýji ulanýar. Xzd çümdüriji CO., Ltd
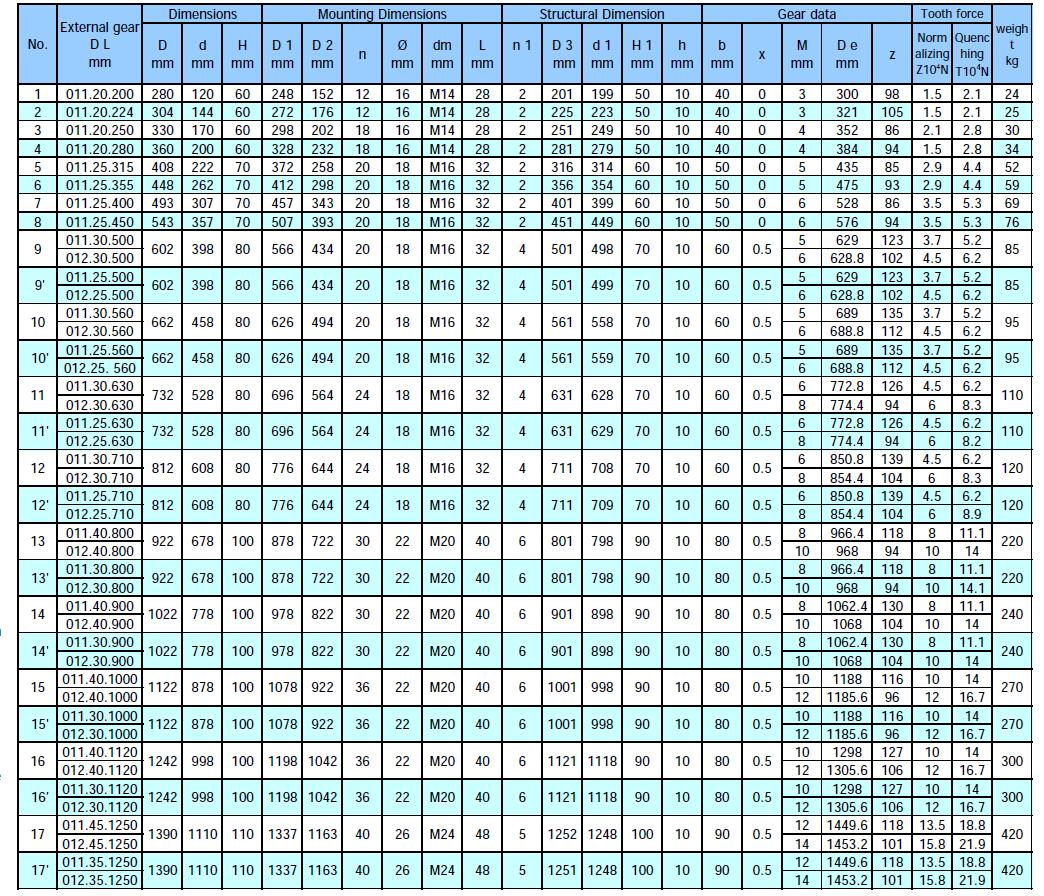
Gaýgysyz pikiriň aşagyndaky mekandan, şkaf görnüşiniň spektalynyň tablisasynyň aşagyndan saýlap bilersiňiz:
Islegiňiz bar bolsa ýa-da jikme-jiklikleri almak isleseňiz, bize ýüz tutup bilersiňiz
1. ISTORION AÇYLYK ISB / T2300-2011-iň enjamlaryna görä, ISO 9001: 2015 we GB / T19001-2008-iň netijeli ýokary ylmy ýokary hilli dolandyryş ulgamlaryny (QMS) tapyldy.
2. Highokary takyk, aýratyn maksatly, aýratyn maksat we talaplar bilen özleşdirilen çukurlara dakmak üçin özümizi bagyşlaň.
3.
4 Içerki hil gözegçiligi biziň ilkinji barlag, oňat barlag, gaýtadan işlemekde, işlemekde, gaýtadan işlemekde, gaýtadan işlemekde önümiň hilini üpjün etmek üçin infektiw gözlegde we nusga almak barlagy öz içine alýar. Kompaniýanyň synag enjamlaryny we ösen synag usuly bar.
5. Güýçli satuw topary, satuw gullugy, müşderi meselelerini öz wagtynda çözüň, dürli hyzmatlar bilen üpjün etmek üçin müşderi kynçylyklaryny wagtynda çözýär.